ROS wiki上的介紹非常簡單扼要『3D visualization tool for ROS.』,跟RQt一樣都是視覺化工具,不過RViz就真的純粹是視覺化展示用,沒有發布等的功能~
那在ROS2中的rviz2其實和ROS1的rviz 其實功能和用法都是一模一樣!
在terminal開啟RViz有兩種方法
rviz2
ros2 run rviz2 rviz2
#都會開啟預設的頁面
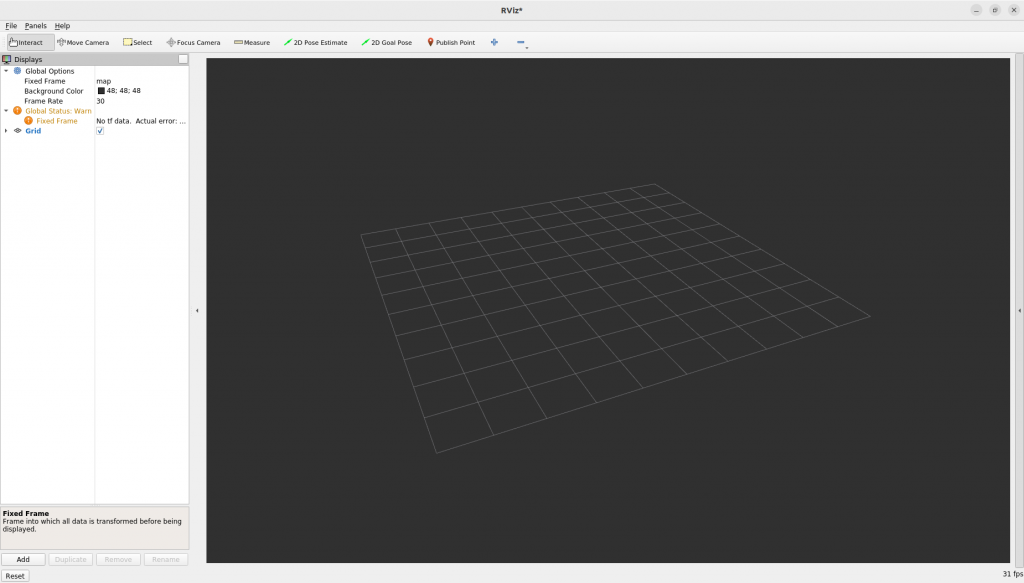
可以看到最左邊的Displays,可以顯示我們在機器人需求中的所有東西,比如機器人模型、點雲、雷射、地圖等等20多項(官網有列出所有的並說明功能以及列出對應的topic),可以透過左下角的add添加置列表~(例如我新增pointcloud2 type)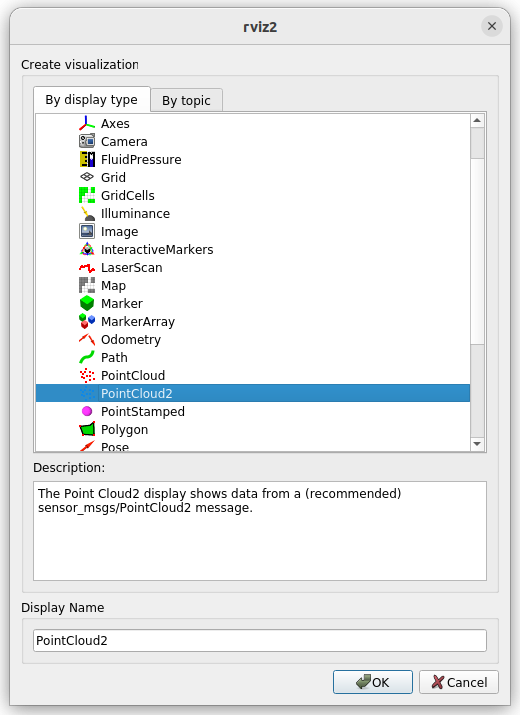
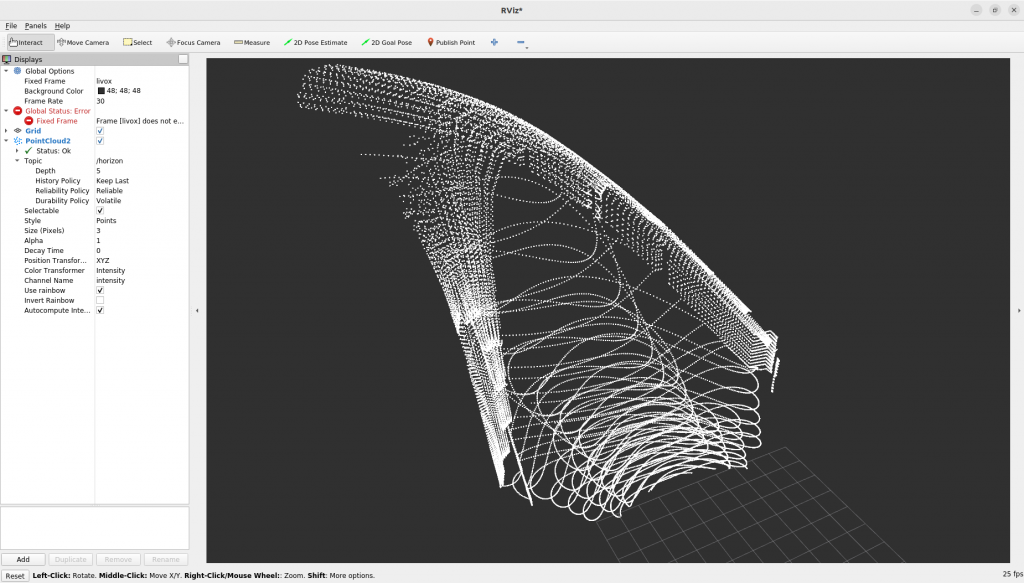
p.s. Fixed Frame要設對才會出現!我目前的點雲是來源是livox模擬,大家要在按照自己的狀況修改~
RViz的部份就沒有太特別的內容了,上方的File可以存下目前RViz的設定值,就不用每次開新的就要重新添加Displays設定囉~
Gazebo是我的惡夢!!!!!!!
Gazebo是一個開源的機器人模擬器,整合了ODE物理引擎、OpenGL渲染以及感測器模擬。Gazebo並不是為ROS而生,但提供了對ROS的外掛,是ROS社群上主流的機器人模擬器之一。
Gazebo和RViz看起來相似,但Gazebo提供了現實世界的物理行為的仿真,適合用來測試機器人或感測器與周遭環境互動。RViz就只是訊息的視覺化,只收不送!!!(因為被問老師問過,特別強調XD)
類似的工具還有以下這些,但我目前都沒用過:
Gazebo的版本其實更新的很快,網路上有很多的Gazebo教學,不管是網友提供或官方提供的都很多。
但!
功能都大同小異,但界面長的不一樣,Gazebo-classic是上面放過得,下面這張則是Ignition Gazebo,應該可以看出『不太一樣』~其他好像還有物理引擎從ODE改成DART?
其實在更仔細去看Ignition會發現每個ros對應的版本名也都不同,總之我個人還是選擇用Gazebo-classic,因為Gazebo本身就很難學,個人又蠻需要多一些教學資源...那大家可以看看未來幾天我遇到的挫折再來決定自己要用哪個版本,甚至拋棄Gazebo???
明天先從基本的urdf開始介紹,比較一下和sdf的差異

